本站原创文章,转载请说明来自《老饼讲解-BP神经网络》bp.bbbdata.com
动量梯度下降法是梯度下降法的一种改进,它加入了动量机制来达到跳出局部最优
本文讲解动量梯度下降算法的原理与算法流程,并展示一个动量梯度下降法的具体代码例子
通过本文可以快速了解什么是动量梯度下降算法,以及如何使用动量梯度下降算法来解决函数优化问题
本节介绍动量梯度下降法的思想以及迭代公式
动量梯度下降法的简介与思想
动量梯度下降法(gradient descent with momentum)是一种加入动量项的梯度下降法
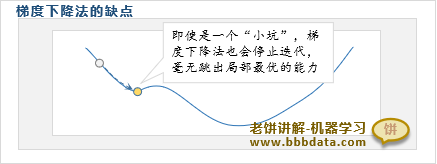
它是对梯度下降法的一种改进,解决梯度下降法毫无办法跳出局部最优的缺点
为了能够跳出局部最优,动量梯度下降法借鉴了物体从高处滚到低处的原理,
由于物体下坡时具有动量,遇到小坑时会由于原有动量的推动,从而跃出小坑
因此,动量梯度下降法在迭代的过程中引入动量的概念
动量梯度下降法迭代公式如下:
其中,:动量系数,一般设为0.9
:负梯度
解释:公式整体的意思是,将"速度"作为X的迭代量,而负梯度则作为速度的修改量
其中,mc是原速度的权重,(1-mc)是加速度(负梯度)的权重
这样做的好处是,在遇到“小坑”的时候,会保持原有的速度方向,冲出小坑
本节介绍动量梯度下降法的算法流程
动量梯度下降法的算法流程
动量梯度下降法的具体算法流程如下
一、设置参数与初始化相关变量
1. 设置学习率lr
lr一般设为0.1
2. 设置动量系数mc
mc一般设为0.9
3. 初始化速度v
v一般初始化为0
4. 初始化初始解x
x随机初始化,或者具体问题具体设定
二、循环迭代
按如下步骤进行迭代
1.计算当前的梯度g
2.计算当前的梯度对v带来的修改量dv
3.计算当前的速度
4.更新x
5.检查迭代终止条件
如果满足终止条件,就退出迭代程序
终止条件可设如下:
(1)是否达到最大迭代次数
(2)目标函数值是否满足要求
(3) x是否多次变化极小
三、输出结果
输出最终的求解结果x
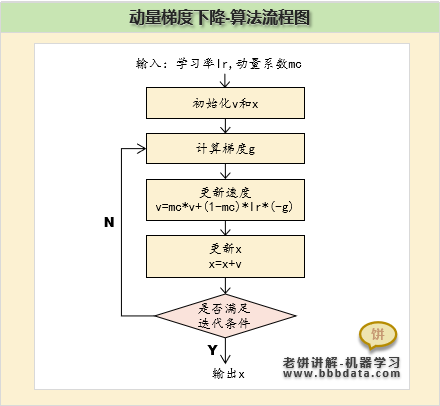
动量梯度下降-算法流程图
动量梯度下降法的算法流程图如下:
本节展示动量梯度下降法求解函数最小值的一个代码实例
动量梯度下降法实例代码
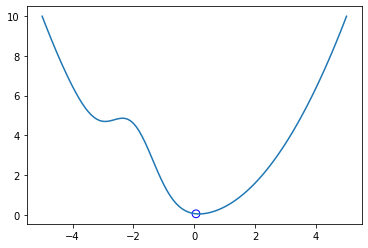
现求解 的极小值
其中,梯度公式为
按照动量梯度下降算法流程,编写程序如下:
# 本代码用动量梯度下降法求解函数y = 0.4*x^2+3*exp(-(x+2)^2) 的极小值
# 代码主旨用于教学,供大家学习理解动量梯度下降法的原理
# 转载请说明来自 《老饼讲解机器学习》 www.bbbdata.com
import numpy as np
import matplotlib.pyplot as plt
line_x = np.arange(-5,5.01,0.1) # 目标函数曲线x
line_y = 0.4*line_x**2+3*np.exp(-(line_x+2)**2); # 目标函数曲线y
lr = 0.1; # 学习率
mc = 0.9; # 动量系数
x = -4; # x的初始值
v = 0; # 初始速度
plt.figure(figsize=(8, 4)) # 设置绘图的大小
for i in range(100) : #
gx = -(0.8*x-6*np.exp(-(x+2)**2)*(x+2)); # 计算负梯度
v = mc*v+(1-mc)*lr*gx; # 将负梯度叠加到上一次速度中,作为本次的速度
x = x+v; # 更新x
y = 0.4*x**2+3*np.exp(-(x+2)**2); # 计算当前的目标函数值
print('第%d轮x的迭代值x=%f'%(i,x)) #
# ----绘图----
plt.clf()
plt.plot(line_x,line_y)
plt.scatter(x,y, marker='o', color='none',edgecolors='b',s=60)
plt.draw()#注意此函数需要调用
plt.pause(0.01)运行结果如下:
第0轮x的迭代值x=-3.970198
第1轮x的迭代值x=-3.914051
第2轮x的迭代值x=-3.835152
第3轮x的迭代值x=-3.737256
第4轮x的迭代值x=-3.624348
....
第95轮x的迭代值x=0.033763
第96轮x的迭代值x=0.037061
第97轮x的迭代值x=0.041660
第98轮x的迭代值x=0.047361
第99轮x的迭代值x=0.053971
经过100步迭代,求得最后y在x=0.053971处取得极小值
End