
本站原创文章,转载请说明来自《老饼讲解-机器学习》www.bbbdata.com
DBSCAN聚类全称为Density-Based Spatial Clustering of Applications with Noise,是基于密度的聚类方法
本文讲解DBSCAN聚类的基本思想,以及DBSCAN聚类算法流程,并根据算法流程自写代码实现一个DBSCAN聚类
通过本文可以快速了解DBSCAN的聚类机制和算法流程,以及如何不调函数自行编写代码实现DBSCAN聚类算法
本节介绍什么是DBSCAN聚类,以及一些相关术语
DBSCAN聚类算法介绍
通俗来说,DBSCAN就是从一个样本出发,依靠近邻找近邻,不断把附近的点纳入同一类别
由于DBSCAN是依靠近邻扫描进行聚类,因此DBSCAN的不受样本的形状约束,且具有极强的抗噪性
为了更专业地描述DBSCAN聚类,下面先介绍一些定义
DBSCAN有两个参数:半径 和 最小样本数,以及下述样本类型和关系:
一、样本点的类型
核心样本点:如果样本的半径内的样本个数最小样本数,则称为核心点
核心样本点代表密度足够,核心样本点允许扩散,继续搜索它的近邻点
边界样本点:不是核心样本点,但在其它核心样本点的半径内
边界样本点可以被核心样本点搜索到,但不会进一步搜索它的近邻点
噪声样本点:既不是核心样本点,又不在其它核心样本点的半径内
噪声点不会被核心样本点搜索到,是较为孤立的点
二、样本点的关系
密度直达 :p是核心点,q在p的范围内,则称p到q是密度直达的
密度直达代表可以通过p直接找到q
密度可达 :如果p到q可通过一连串的密度直达连接,则称p到q是密度可达的
密度可达代表可以通过p可以找到q
密度相连 :如果o到p,q都是密度可达的,则称p,q密度相连
密度相连代表p,q能同时被某个点o找到
根据以上定义,DBSCAN的聚类描述如下:
DBSCAN聚类从一个样本点p出发(p必须是核心点,边界、噪声点根本出发不了)
通过密度直达不断传播,直到边界点样本点为止,本次找到的所有样本归为一个类别
可知,所有与p密度可达的样本都会被找到,样本之间的允许的最大跨度是"密度相连"
本节介绍DBSCAN的具体聚类流程,以及展示算法流程图
DBSCAN聚类流程
DBSCAN的算法流程如下:
一、初始化所有样本均未被访问过
二、对所有样本点进行历遍:
1. 如果样本已被访问过:
继续下一个样本
2. 如果不是核心样本点:
将样本标为噪声,并标记样本已被访问,继续下一个样本
3. 如果是核心样本点:
创建一个类别
标记该样本已被访问
将样本的密度直达样本放到搜索队列
历遍搜索队列样本 :
样本还没有类别,则标上当前类别
如果样本被访问过,继续下一个样本
标记样本被访问
如果是核心点,将样本的密度直达样本放到搜索队列,并去重
(备注:后期会有许多样本已被访问,因此在放上队列前可先作筛选)
三、输出最终每个样本的分类
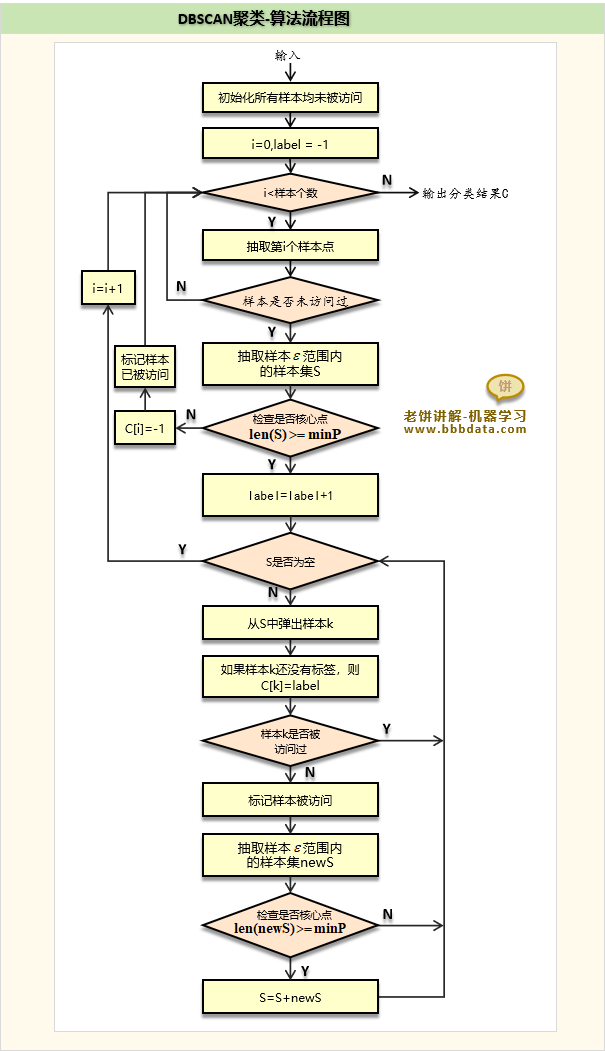
DBSCAN聚类流程图
DBSCAN聚类的算法流程图如下:
本节展示如何使用代码自行实现DBSCAN聚类算法
自写代码实现-DBSCAN聚类
下面不用软件包,自行实现DBSCAN算法进行聚类
说明:本代码由笔者根据原理的理解编写,仅供参考与学习
具体代码如下:
import numpy as np
import matplotlib.pyplot as plt
from sklearn import datasets
# -------------成生数据
X1, y1=datasets.make_circles(n_samples=5000, factor=.5,noise=.05)
X2, y2 = datasets.make_blobs(n_samples=100
,n_features=2
,centers=[[2,2]]
,cluster_std=[[.1]]
,random_state=0)
X = np.concatenate((X1, X2)) # 样本数据
esp = 0.15 # 设置范围
minP= 2 # 最小样本数
n_sample = X.shape[0] # 样本个数
C = np.zeros([n_sample,1]) # 初始化类别
v = np.zeros([n_sample,1]) # 初始化访问表
lable = -1 # 初始化当前类别标签
for i in range(n_sample): # 逐样本循环
if (v[i]==1): # 如果样本已经访问过,则放弃
continue # 直接进入下一次循环
v[i] = 1 # 标记样本已被访问
d = np.sqrt(((X[i]-X)*(X[i]-X)).sum(axis=1)) # 计算距离
d[i] += esp +1 # 为了屏蔽当前样本,将距离置为比eps大
if sum(d<esp)<minP: # 如果不是核心点
C[i] = -1 # 标为噪声样本
continue # 继续下一个样本
search_list= list(np.where(d<esp)[0]) # 找出直达样本作为搜索列表
lable +=1 # 本次的类别标签
C[i] = lable # 标记当前样本的类别
while(len(search_list)>0): # 如果搜索列表不为空,则进行搜索
print(sum(v))
cur_idx = search_list.pop(0) # 从列表中弹出一个样本
cur_x = X[cur_idx] # 获取样本数据
if(C[cur_idx]<=0): # 如果样本还没有类别
C[cur_idx] = lable # 则标示为本类别
if(v[cur_idx]==0): # 如果样本还没被访问过
v[cur_idx] = 1 # 标记样本已经被访问
d = np.sqrt(((X[cur_idx]-X)*(X[cur_idx]-X)).sum(axis=1)) # 计算样本与其它样本的距离
d[i] += esp+1 # 为了屏蔽当前样本,将距离置为比eps大
if sum(d<esp)>=minP: # 如果是核心点
new_p = np.where(d<esp)[0] # 找出当前样本的直达样本
noise_idx = np.where((v[new_p]==1)&(C[new_p]<=0))[0] # 直达样本中之前被认为是噪声的样本
C[noise_idx] = lable # 将其标记本次类别
valid_idx = np.where((v[new_p]==0))[0] # 直达样本中未被访问过的样本
new_search =list(new_p[valid_idx]) # 将其作为新增的搜索样本
search_list= list(set(search_list + new_search)) # 添加到搜索列表
plt.scatter(X[:, 0], X[:, 1], c=C) # 绘制聚类结果
plt.show() # 显示运行结果如下:
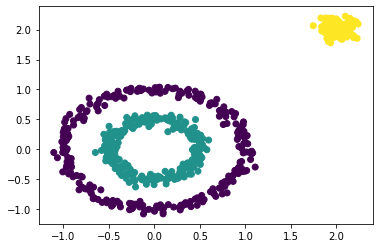
可以看到,自写的算法已经成功地把样本分为三类,说明算法是有效的
也可以使用sklearn来实现,具体可参考《一篇入门之-DBSCAN聚类》
好了,以上就是如何自实现一个DBSCAN聚类算法了~
End
 评论
评论


