本站原创文章,转载请说明来自《老饼讲解-深度学习》www.bbbdata.com
Inception-V3模型是基于“对卷积神经网络的重新思考”下,重新推出的一个Inception卷积神经网络
本文讲解Inception-V3的模型结构和其中的各个inception模块,并展示Inception-V3的代码实现
通过本文,可以了解什么是Inception-V3卷积神经网络,以及如何使用代码实现一个Inception-V3模型
本节介绍Inception-V3模型的结构,快速了解InceptionV3模型是什么
Inception-V3模型是什么
Inception-V3模型出自2015的论文《Rethinking the Inception Architecture for Computer Vision》
Inception-V3主要是对卷积神经网络和Inception的一些本质与特性进行各种零零散散的思考
然后根据这些零零散散的思考结果,修改了Inception-V1、2模型的结构,推出了新的Inception-V3模型
其中,Inception-V3比较特别的是,引入了用于降维的Inception模块
Inception-V3模型结构如下:

Inception-V3模型主体是基于Inception-V1进行修改
修改的地方主要如下:
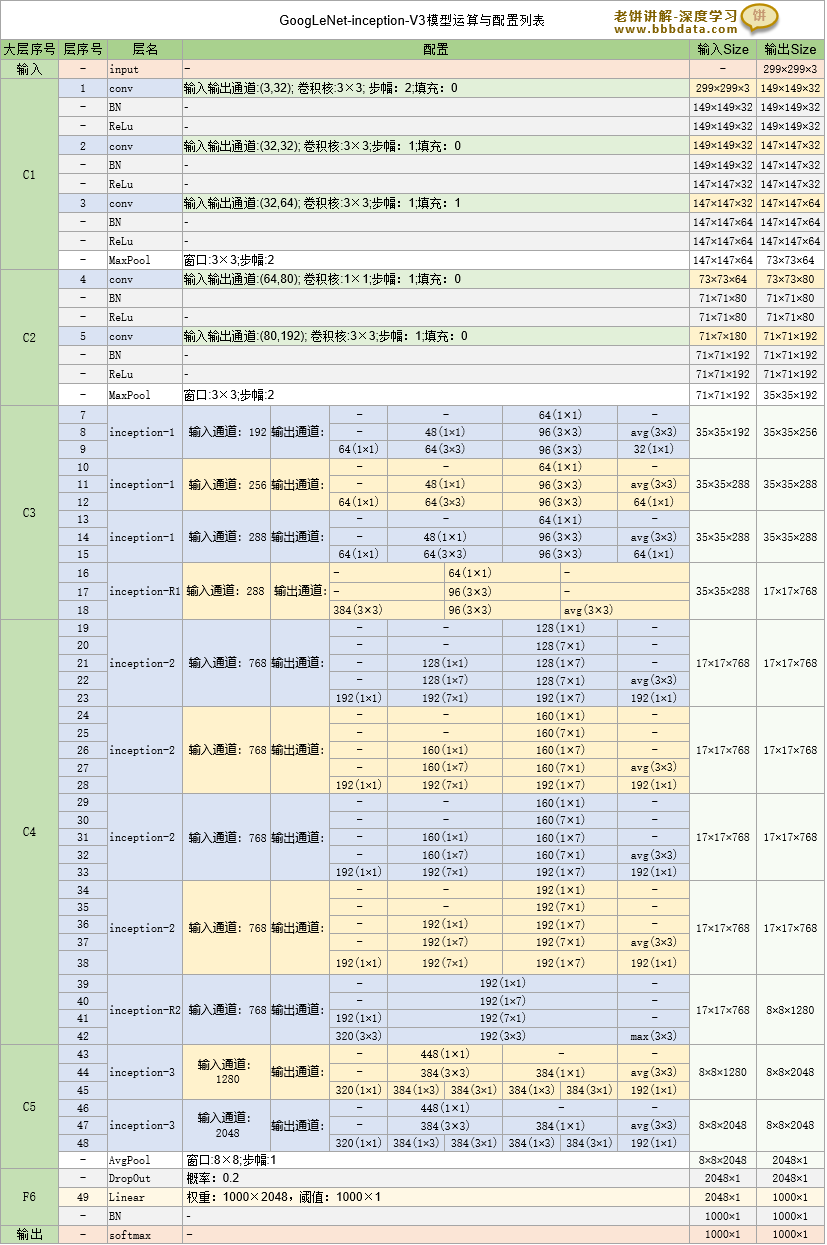
1. 输入
输入改为了299*299
2. 普通卷积层(C1、C2)
(1)C1层用三个3*3卷积替代V1的7*7卷积
(2)C1、C2去除了LRN归一化
3. Inception层(C3、C4、C5)
(1)C3、C4、C5层分别用不同的inception结构模块
(2)C3、C4层改用inception-R1、R2来替代池化
(3)C4层减少了一个inception模块
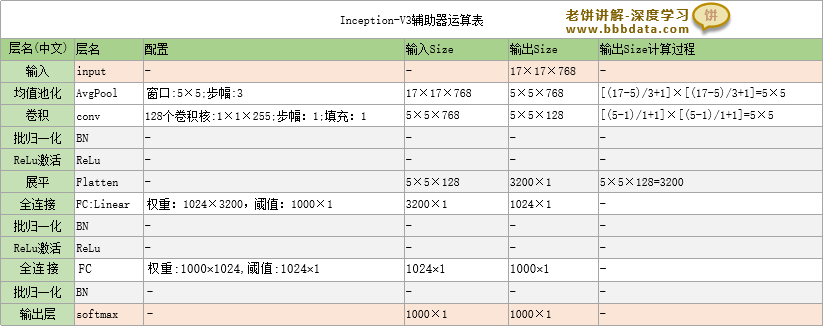
4. 辅助器
去除了低层的辅助器,只保留高层的辅助器
5. 加入BN层
所有非线性函数(ReLu和softMax)前加入了BN层进行归一化
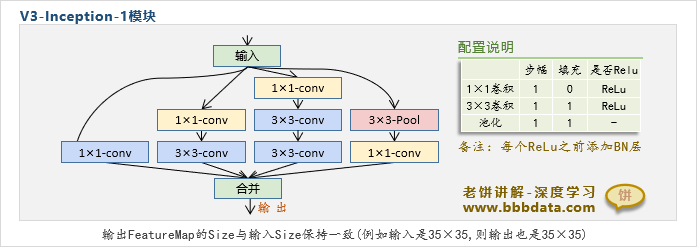
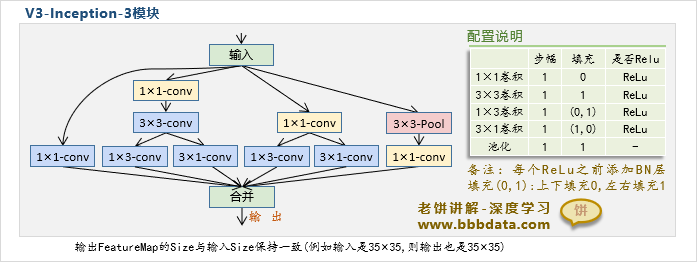
Inception-V3中的各个Inception模块
Inception-V3中的3个Inception模块如下:
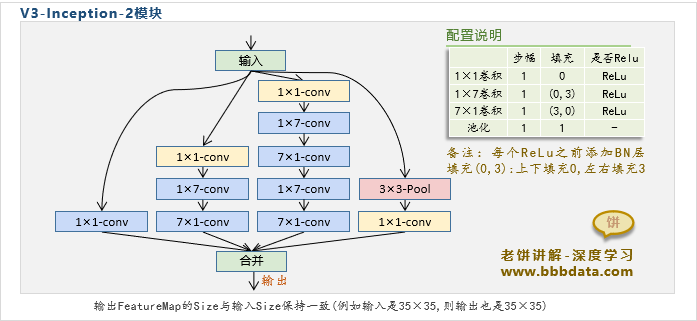
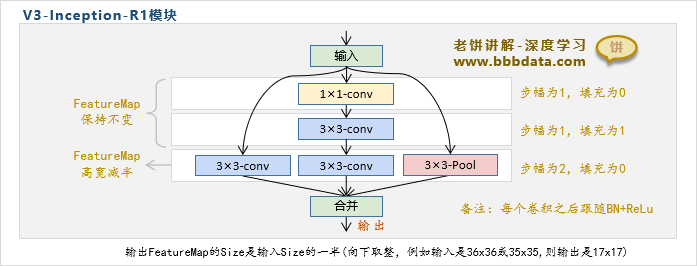
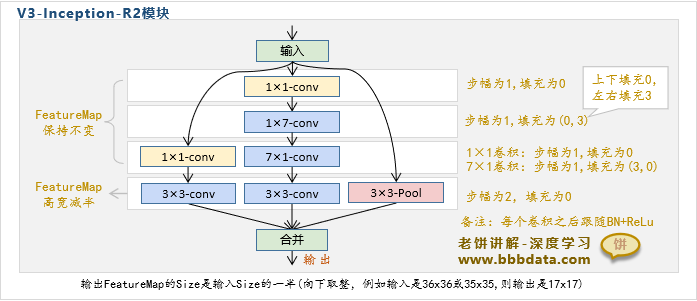
Inception-V3提出了两个Inception降维模块,用来替代单纯的池化
它的思想主要是用池化减少FeatureMap的同时,用卷积来补充通道数,避免信息损失过多
Inception-V3中的2个降维Inception模块如下:
本节展示Inception-V3模型的详细配置,通过本节可以了解Inception-V3模型的详细运算过程
GoogLeNet-Inception-V3配置与运算
GoogLeNet-Inception-V3的具体运算过程与配置如下:
其中侧头的辅助器的运算与配置如下:
如果输入不是299× 299,而是更小尺寸,可根据原文中提供的方案进行调整
具体如下:
1. 如果输入略小于299× 299,将第一层的卷积步幅改为1
例如输入为151 × 151,可以采用该方案
2. 如果输入远小于299× 299,将第一层的卷积步幅改为1,并去掉第一个池化层
例如输入为79 × 79,可以采用该方案
本节展示Inception-V3卷积神经网络的代码实现
Inception-V3-代码实现
要实现Inception-V3模型,需要定义好各个Inception模块,然后再按模型的主流程进行各层的配置就可以了
具体代码如下:
# 本代码用于实现InceptionV3模型
# 转载请说明来自 《老饼讲解-深度学习》 www.bbbdata.com
from torch import nn
import torch
# 定义带BN和ReLu的卷积
class CovWithBNReLu(nn.Module):
def __init__(self,in_channels,out_channels,k,s,p):
super(CovWithBNReLu, self).__init__()
self.stack = nn.Sequential(
nn.Conv2d(in_channels ,out_channels, kernel_size=k,stride=s,padding=p),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.stack(x)
# InceptionV3_1模块
class InceptionV3_1(nn.Module):
def __init__(self,C,C1,C2,C3,C4,pool='max'):
super(InceptionV3_1, self).__init__()
# 1*1卷积部分
self.R1 = CovWithBNReLu(C,C1,k=1,s=1,p=0)
# 3*3卷积部分
self.R2 = nn.Sequential(CovWithBNReLu(C ,C2[0],k=1,s=1,p=0),
CovWithBNReLu(C2[0],C2[1],k=3,s=1,p=1))
# 双层3*3卷积部分
self.R3 = nn.Sequential(CovWithBNReLu(C ,C3[0],k=1,s=1,p=0),
CovWithBNReLu(C3[0],C3[1],k=3,s=1,p=1),
CovWithBNReLu(C3[1],C3[2],k=3,s=1,p=1))
# 池化部分
if(pool=='max'):
P = nn.MaxPool2d(kernel_size=3,stride=1,padding=1)
else:
P = nn.AvgPool2d(kernel_size=3,stride=1,padding=1)
self.R4 = nn.Sequential(P, CovWithBNReLu(C,C4, k=1,s=1,p=0))
def forward(self, x):
y1 =self.R1(x)
y2 =self.R2(x)
y3 =self.R3(x)
y4 =self.R4(x)
y = torch.cat((y1,y2, y3, y4), dim=1)
return y
# InceptionV3_2模块
class InceptionV3_2(nn.Module):
def __init__(self,C,C1,C2,C3,C4,pool='max'):
super(InceptionV3_2, self).__init__()
#-------定义各条路线所使用的计算模块---------
# 1*1卷积部分
self.R1 = CovWithBNReLu(C,C1, k=1,s=1,p=0)
# 单层1*7/7*1卷积部分
self.R2 = nn.Sequential(
CovWithBNReLu(C ,C2[0], k=1,s=1,p=0)
,CovWithBNReLu(C2[0],C2[1], k=(1,7),s=1,p=(0,3))
,CovWithBNReLu(C2[1],C2[2], k=(7,1),s=1,p=(3,0)))
# 双层1*7/7*1卷积部分
self.R3 = nn.Sequential(
CovWithBNReLu(C ,C3[0], k=1,s=1,p=0)
,CovWithBNReLu(C3[0],C3[1],k=(1,7),s=1,p=(0,3))
,CovWithBNReLu(C3[1],C3[2],k=(7,1),s=1,p=(3,0))
,CovWithBNReLu(C3[2],C3[3],k=(1,7),s=1,p=(0,3))
,CovWithBNReLu(C3[3],C3[4],k=(7,1),s=1,p=(3,0)))
# 池化部分
if(pool=='max'):
P = nn.MaxPool2d(kernel_size=3,stride=1,padding=1)
else:
P = nn.AvgPool2d(kernel_size=3,stride=1,padding=1)
self.R4 = nn.Sequential(P,CovWithBNReLu(C,C4,k=1,s=1,p=0))
def forward(self, x):
y1 = self.R1(x)
y2 = self.R2(x)
y3 = self.R3(x)
y4 = self.R4(x)
y = torch.cat((y1, y2, y3, y4), dim=1)
return y
# InceptionV3_3模块
class InceptionV3_3(nn.Module):
def __init__(self,C,C1,C2,C3,C4,pool='max'):
super(InceptionV3_3, self).__init__()
#-------定义各条路线所使用的计算模块---------
# 1*1卷积部分
self.R1 = CovWithBNReLu(C,C1, k=1,s=1,p=0)
# 3*3+分枝卷积部分
self.R2 = nn.Sequential(
CovWithBNReLu(C,C2[0],k=1,s=1,p=0)
,CovWithBNReLu(C2[0],C2[1],k=3,s=1,p=1)
)
self.R21 = CovWithBNReLu(C2[1],C2[2],k=(1,3),s=1,p=(0,1))
self.R22 = CovWithBNReLu(C2[1],C2[3],k=(3,1),s=1,p=(1,0))
# 单层分枝卷积部分
self.R3 = CovWithBNReLu(C ,C3[0],k=1,s=1,p=0)
self.R31 = CovWithBNReLu(C3[0],C3[1],k=(1,3),s=1,p=(0,1))
self.R32 = CovWithBNReLu(C3[0],C3[2],k=(3,1),s=1,p=(1,0))
# 池化部分(支持屏蔽降维卷积)
if(pool=='max'):
P = nn.MaxPool2d(kernel_size=3,stride=1,padding=1)
else:
P = nn.AvgPool2d(kernel_size=3,stride=1,padding=1)
self.R4 = nn.Sequential(P,CovWithBNReLu(C,C4,k=1,s=1,p=0))
def forward(self, x):
#-----------y1-----------
y1 = self.R1(x)
#-----------y2-----------
y2 = self.R2(x)
y21 = self.R21((y2))
y22 = self.R22((y2))
#-----------y3-----------
y3 = self.R3(x)
y31 = self.R31(y3)
y32 = self.R32(y3)
#-----------y4----------
y4 = self.R4(x)
y = torch.cat((y1, y21,y22,y31,y32, y4), dim=1)
return y
# InceptionV3_R1降维模块
class InceptionV3_R1(nn.Module):
def __init__(self,C,C1,C2,pool='max'):
super(InceptionV3_R1, self).__init__()
#-------定义各条路线所使用的计算模块---------
# 单层3*3卷积部分
self.R1 = CovWithBNReLu(C,C1, k=3,s=2,p=0)
# 双层3*3卷积部分
self.R2 = nn.Sequential(
CovWithBNReLu(C,C2[0],k=1,s=1,p=0)
,CovWithBNReLu(C2[0],C2[1],k=3,s=1,p=1)
,CovWithBNReLu(C2[1],C2[2],k=3,s=2,p=0)
)
# 池化部分
if(pool=='max'):
P = nn.MaxPool2d(kernel_size=3,stride=2,padding=0)
else:
P = nn.AvgPool2d(kernel_size=3,stride=2,padding=0)
self.R3 = P
def forward(self, x):
y1 = self.R1(x)
y2 = self.R2(x)
y3 = self.R3(x)
y = torch.cat((y1, y2,y3), dim=1)
return y
# InceptionV3_R2降维模块
class InceptionV3_R2(nn.Module):
def __init__(self,C,C1,C2,pool='max'):
super(InceptionV3_R2, self).__init__()
#-------定义各条路线所使用的计算模块---------
# 单层3*3卷积部分
self.R1 = nn.Sequential(
CovWithBNReLu(C,C1[0],k=1,s=1,p=0)
,CovWithBNReLu(C1[0],C1[1],k=3,s=2,p=0)
)
# 双层3*3卷积部分
self.R2 = nn.Sequential(
CovWithBNReLu(C,C2[0],k=1,s=1,p=0)
,CovWithBNReLu(C2[0],C2[1],k=(1,7),s=1,p=(0,3))
,CovWithBNReLu(C2[1],C2[2],k=(7,1),s=1,p=(3,0))
,CovWithBNReLu(C2[2],C2[3],k=3,s=2,p=0)
)
# 池化部分
if(pool=='max'):
P = nn.MaxPool2d(kernel_size=3,stride=2,padding=0)
else:
P = nn.AvgPool2d(kernel_size=3,stride=2,padding=0)
self.R3 = P
def forward(self, x):
y1 =self.R1(x)
y2 =self.R2(x)
y3 =self.R3(x)
y = torch.cat((y1, y2,y3), dim=1)
return y
# InceptionNet3卷积神经网络的结构
class InceptionNet3(nn.Module):
def __init__(self,in_channel,num_classes):
super(InceptionNet3, self).__init__()
self.nn_stack=nn.Sequential(
#--------------C1层-------------------
nn.Conv2d(in_channel,32, kernel_size=3,stride=2,padding=0),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
# 输出149*149*32
nn.Conv2d(32,32, kernel_size=3,stride=1,padding=0),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
# 输出147*147*32
nn.Conv2d(32,64, kernel_size=3,stride=1,padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3,stride=2,padding=0),
# 输出73*73*64
#--------------C2层-------------------
nn.Conv2d(64,80, kernel_size=1,stride=1,padding=0),
nn.BatchNorm2d(80),
nn.ReLU(inplace=True),
# 输出71*71*80
nn.Conv2d(80,192, kernel_size=3,stride=1,padding=0),
nn.BatchNorm2d(192),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3,stride=2,padding=0),
# 输出35*35*192
#--------------C3层-------------------
InceptionV3_1(C=192,C1=64,C2=[48,64],C3=[64,96,96],C4=32,pool='avg'),
InceptionV3_1(C=256,C1=64,C2=[48,64],C3=[64,96,96],C4=64,pool='avg'),
InceptionV3_1(C=288,C1=64,C2=[48,64],C3=[64,96,96],C4=64,pool='avg'),
InceptionV3_R1(C=288,C1=384,C2=[64,96,96],pool='avg'),
# 输出17*17*768
#--------------C4层-------------------
InceptionV3_2(C=768,C1=192,C2=[128,128,192],C3=[128,128,128,128,192],C4=192,pool='avg'),
InceptionV3_2(C=768,C1=192,C2=[160,160,192],C3=[160,160,160,160,192],C4=192,pool='avg'),
InceptionV3_2(C=768,C1=192,C2=[160,160,192],C3=[160,160,160,160,192],C4=192,pool='avg'),
InceptionV3_2(C=768,C1=192,C2=[192,192,192],C3=[192,192,192,192,192],C4=192,pool='avg'),
InceptionV3_R2(C=768,C1=[192,320],C2=[192,192,192,192],pool='max'),
# 输出8*8*1280
#--------------C5层-------------------
InceptionV3_3(C=1280,C1=320,C2=[448,384,384,384],C3=[384,384,384],C4=192,pool='avg'),
InceptionV3_3(C=2048,C1=320,C2=[448,384,384,384],C3=[384,384,384],C4=192,pool='avg'),
nn.AvgPool2d(kernel_size=8,stride=1,padding=0),
# 输出1*1*2048
#--------------全连接层F6----------
nn.Flatten(),
torch.nn.Dropout(p=0.2),
nn.Linear(2048, num_classes),
nn.BatchNorm1d(num_classes),
)
def forward(self, x):
p = self.nn_stack(x)
return p
# ------测试模型---------
x = torch.rand(2,3,299,299)
model = InceptionNet3(in_channel =3,num_classes=1000)
y= model(x)这里只展示Inception-v3模型的代码实现,具体训练可借鉴Inception-v1模型
好了,上述就是GoogLeNet-Inception-V3的主要内容了~
.
End
 评论
评论